استفاده از میکرو جت ها برای کنترل یک پهپاد به صورت آزمایشی آغاز شده است. در این روش با استفاده از سرعت گازهای خروجی از یک میکروجت نیروی لازم برای تغییر مسیر یک پهپاد کوچک ایجاد می شود. در این طرح دو هدف ایرودینامیکی و کنترلی دنبال می شود. ابتدا از جدایش جریان بر روی بال جلوگیری می شود و در مرحله دوم کنترل هواپیما از نیروی بوجود آمده سود می برد.
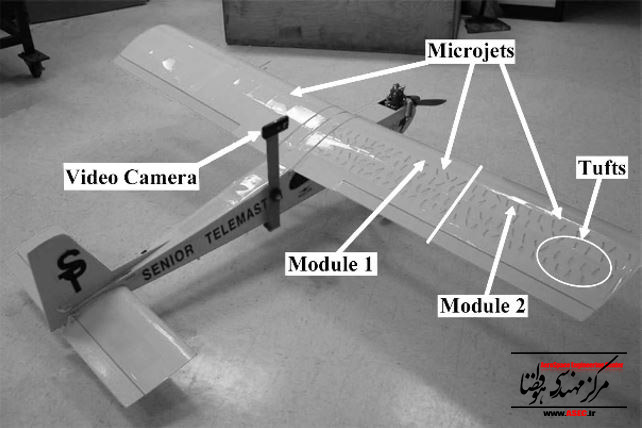
استفاده از میکرو جت در کنترل جریان و کنترل پرواز
در روش دیگر با استفاده از میکروجت ها در انتها دم ، وظیفه الویتور به صورت کامل پوشش داده می شود. این روش موجب می شود که اختلالات جریان ناشی از استفاده از الویتورهای معمول به صورت کامل از بین برود و کارایی آیرودینامیک پهپاد افزایش یابد.

استفاده از میکرو جت در کنترل پیچ
می توان از این روش به عنوان یک جایگزین مطمئن در کنترل pitch هواپیما در آینده نام برد. روش پیچش خودکار بال (ATW)، این روش به عنوان جاگزینی برای شهپر های معمول و همچنین افزایش کارایی در پهپادهای ارتفاع کوتاه برد بلند (MALE) به کار می رود. در این روش از باکس بال شامل دیواره نازک بسته و دو اسپار با قابلیت تغییر سختی پیچشی استفاده می شود. تغییرات سختی پیچشی موجب می شود یک پیچش آیروالاستیک در بال ایجاد شود.
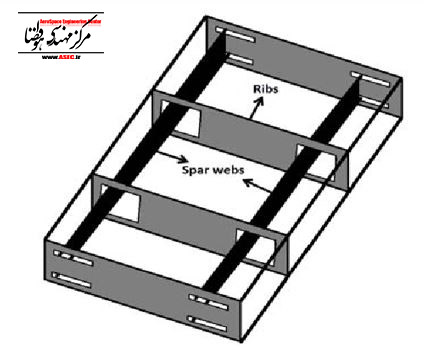
طرح بال ATW
با توجه به رابطه سختی پیچشی:
اگر از یک ماده یکسان استفاده شود سختی خمشی به A مساحت بخش بسته جدار نازک بستگی دارد. در نتیجه می توان با تغییر مکان اسپارها تغییرات لازم را در سختی پیچشی به وجود آورد. با توجه به تصویر زیر می توان با جابجایی اسپار در دوحالت اولیه و ثانویه بیشترین و کمترین مقدار سختی پیچشی را ایجاد کرد:
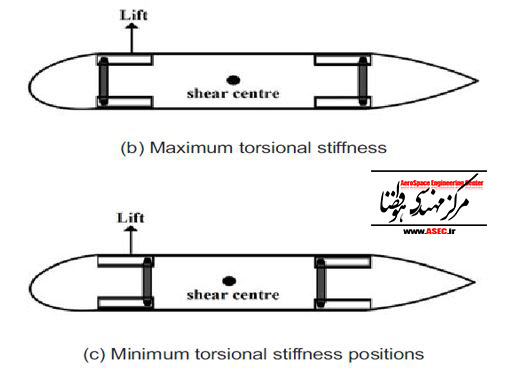
تغییر سختی پیچشی بال
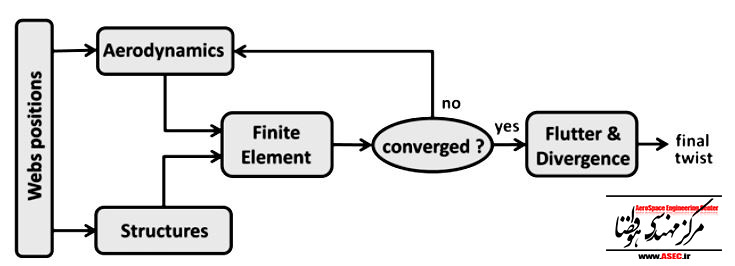
عملکرد این سیستم به صورت هوشمند می باشد چراکه چرخش زیاد در بال احتمال ایجاد فلاتر (نوسانات شدید بال) را بالا می برد و در نتیجه باید حالت بهینه بین کارایی آیرودینامیکی و سازه ای انتخاب شود. در این راستا سیستم کنترلی با الگوریتم زیر در این نوع بال ها استفاده می شود: